⚙️ IMU سنسور کالیبراسیون (شتابسنج و ژیروسکوپ)
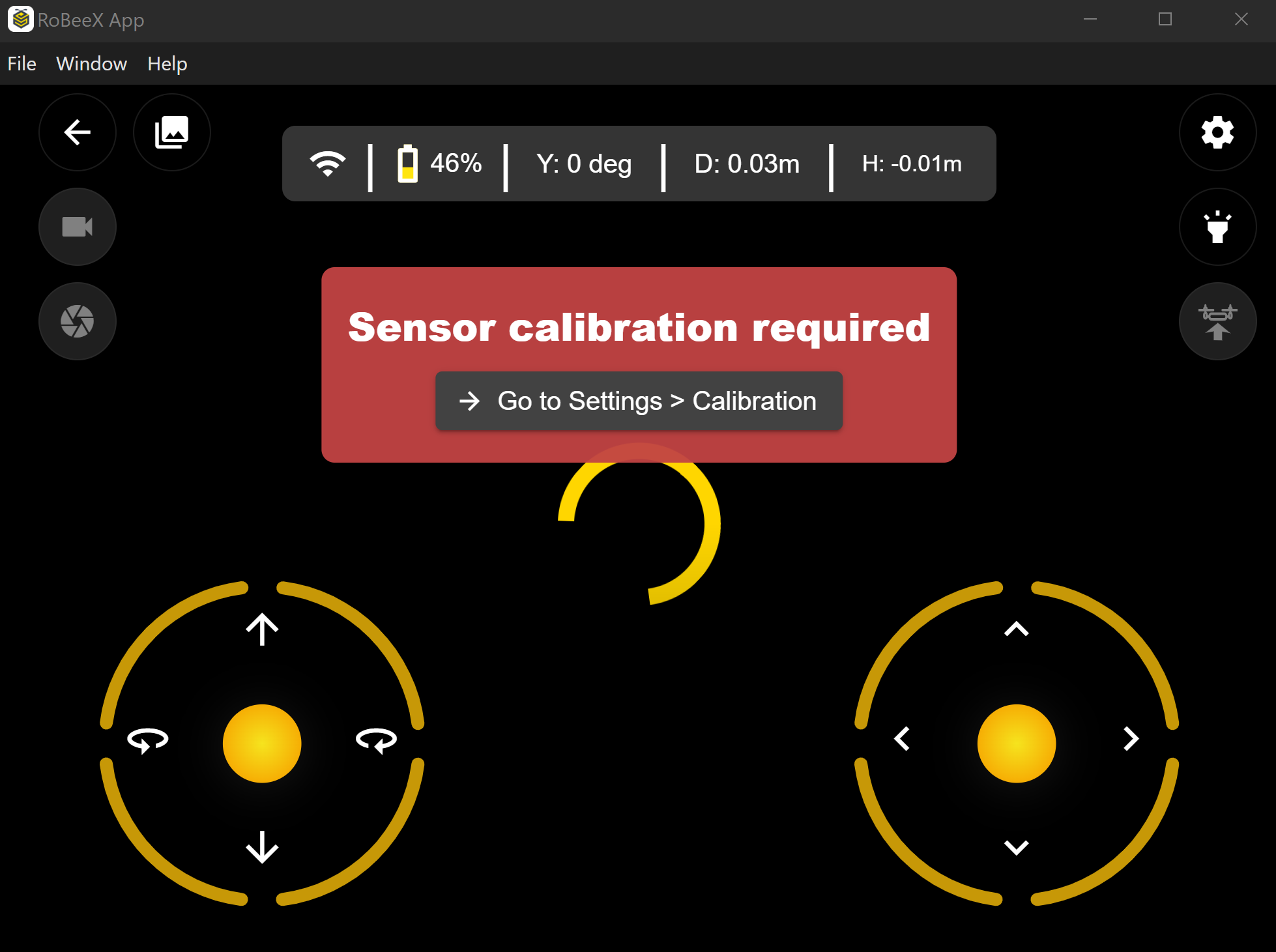
واحد اندازهگیری اینرسی (IMU) بسته سنسور اصلی (ژیروسکوپ و شتابسنج) برای کنترل پرواز پایدار است. بازکالیبراسیون پس از یک سقوط، فرودهای سخت یا زمانی که برنامه RoBeeX به طور خاص درخواست می کند (به عنوان مثال، زمانی که پیام Sensor calibration required روی صفحه پرواز نشان داده شود) ضروری است.
DANGER
🔴🟡 هشدار حیاتی: خطای سنسور
اگر LED های RGB پهپاد شروع به چشمک زدن متناوب قرمز و زرد (🔴🟡) کنند، این نشان دهنده خطای حیاتی سنسور است و تایید می کند که IMU به کالیبراسیون فوری نیاز دارد.
1. 🛠️ آماده سازی و اتصال
قبل از شروع هر کالیبراسیونی، مطمئن شوید که مراحل زیر کامل شده اند:
ایمنی و باتری:
- تمام محافظ های ملخ را از هواپیما جدا کنید.
- اطمینان حاصل کنید که باتری پهپاد بالای 50٪ است.
روشن کردن و اتصال Wi-Fi:
- روشن کردن: پهپاد RoBeeX AI خود را روشن کنید.
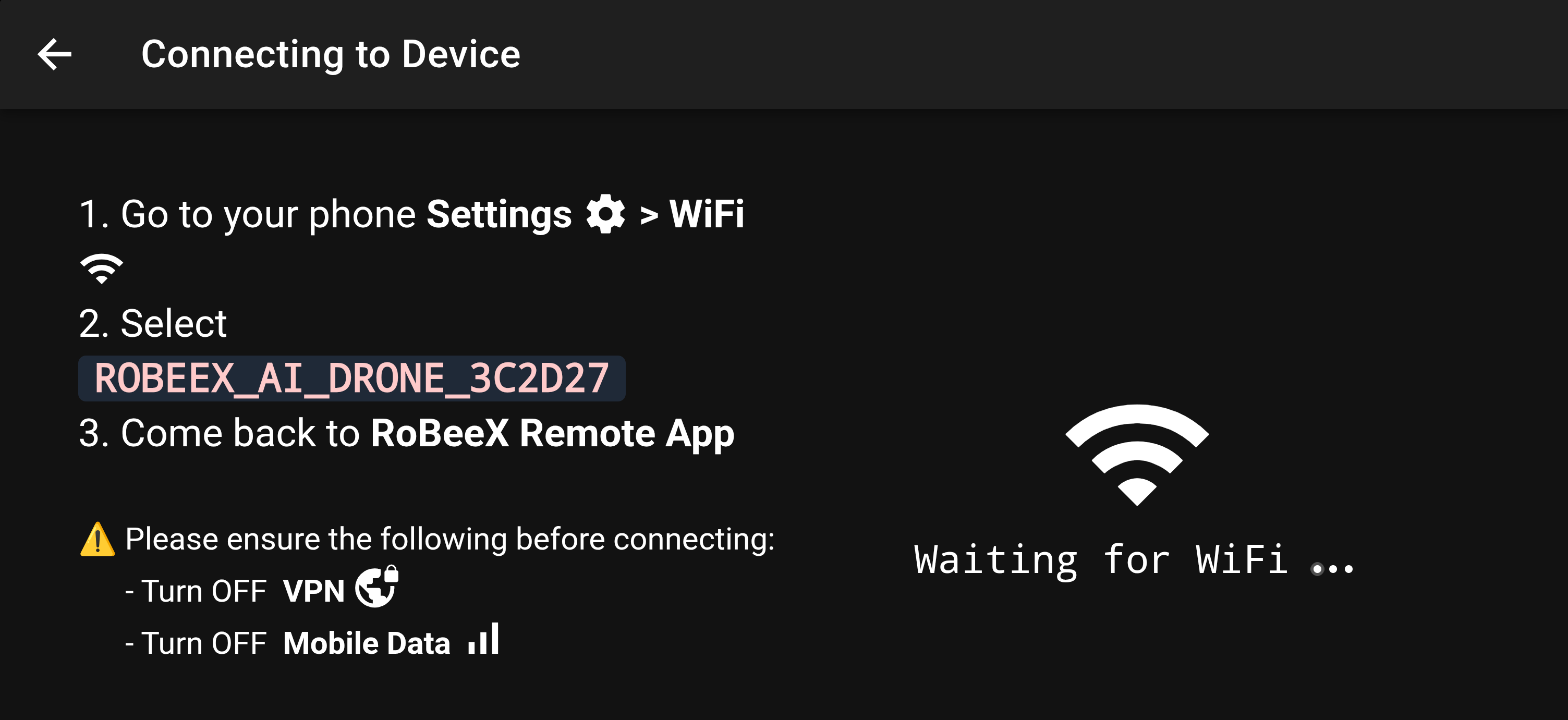
- اتصال موبایل/PC: به تنظیمات دستگاه خود بروید و به صورت دستی به شبکه Wi-Fi پهپاد (به عنوان مثال، ROBEEX_AI_DRONE_XXXXXX) متصل شوید.
رمز عبور Wi-Fi: رمز عبور پیش فرض برای هر پهپاد RoBeeX AI،
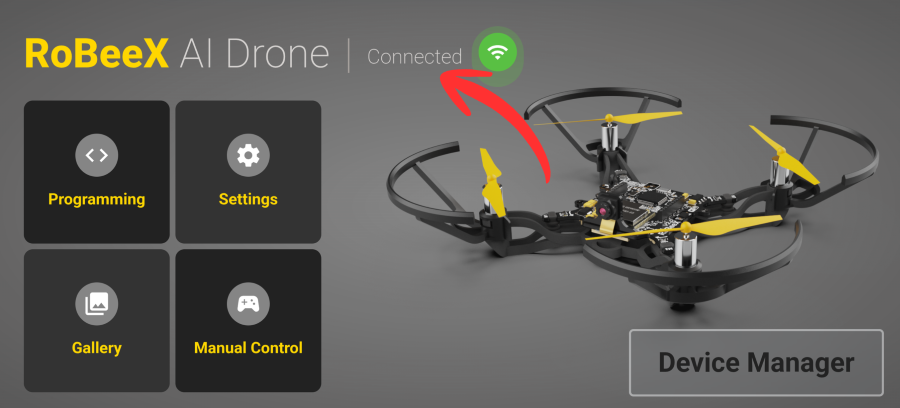
1234567890است. - وضعیت برنامه: به برنامه RoBeeX بازگردید. صفحه اصلی اکنون باید "Connected" را نشان دهد.
🚨اطلاعیه پیش نیاز اتصال
مهم: لطفاً اطمینان حاصل کنید که تنظیمات زیر در دستگاه تلفن همراه یا لپ تاپ خود خاموش هستند قبل از تلاش برای اتصال به شبکه Wi-Fi پهپاد RoBeeX:
- VPN (شبکه خصوصی مجازی) را خاموش کنید.
- داده تلفن همراه را خاموش کنید.
این خدمات می توانند در اتصال مستقیم Wi-Fi نظیر به نظیر مورد نیاز برای برقراری ارتباط با پهپاد تداخل ایجاد کنند.
2. 🎯 کالیبراسیون ژیروسکوپ
ژیروسکوپ چرخش پهپاد را تشخیص می دهد. این روش ساده امکان صفر شدن انحراف را فراهم می کند.
روش کار
- قرارگیری (حیاتی):
- پهپاد RoBeeX را روی سطحی قرار دهید که کاملاً تراز، صاف و پایدار باشد (به عنوان مثال، یک میز یا کف محکم).
- پهپاد باید در طول کالیبراسیون کاملاً ثابت باشد.
- آغاز:
- برنامه RoBeeX را باز کنید و به Settings → تب Calibration بروید.
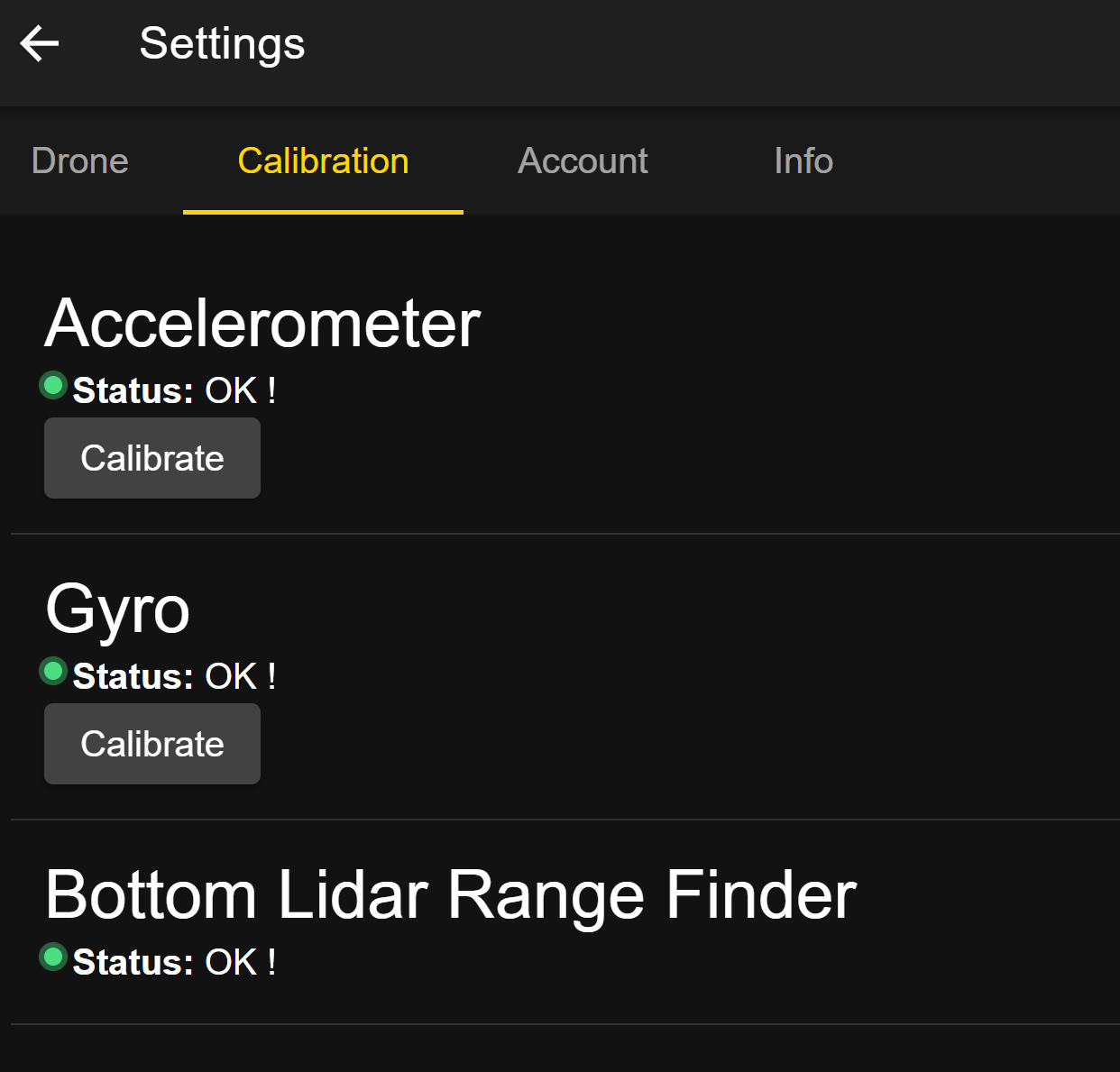
* در بخش **Gyro**، گزینه **"Calibrate"** را انتخاب کنید.
- اجرا:
- برنامه صفحه ای را نشان می دهد که به شما دستور می دهد تا پهپاد را ثابت نگه دارید تا زمانی که تصویر سبز شود.
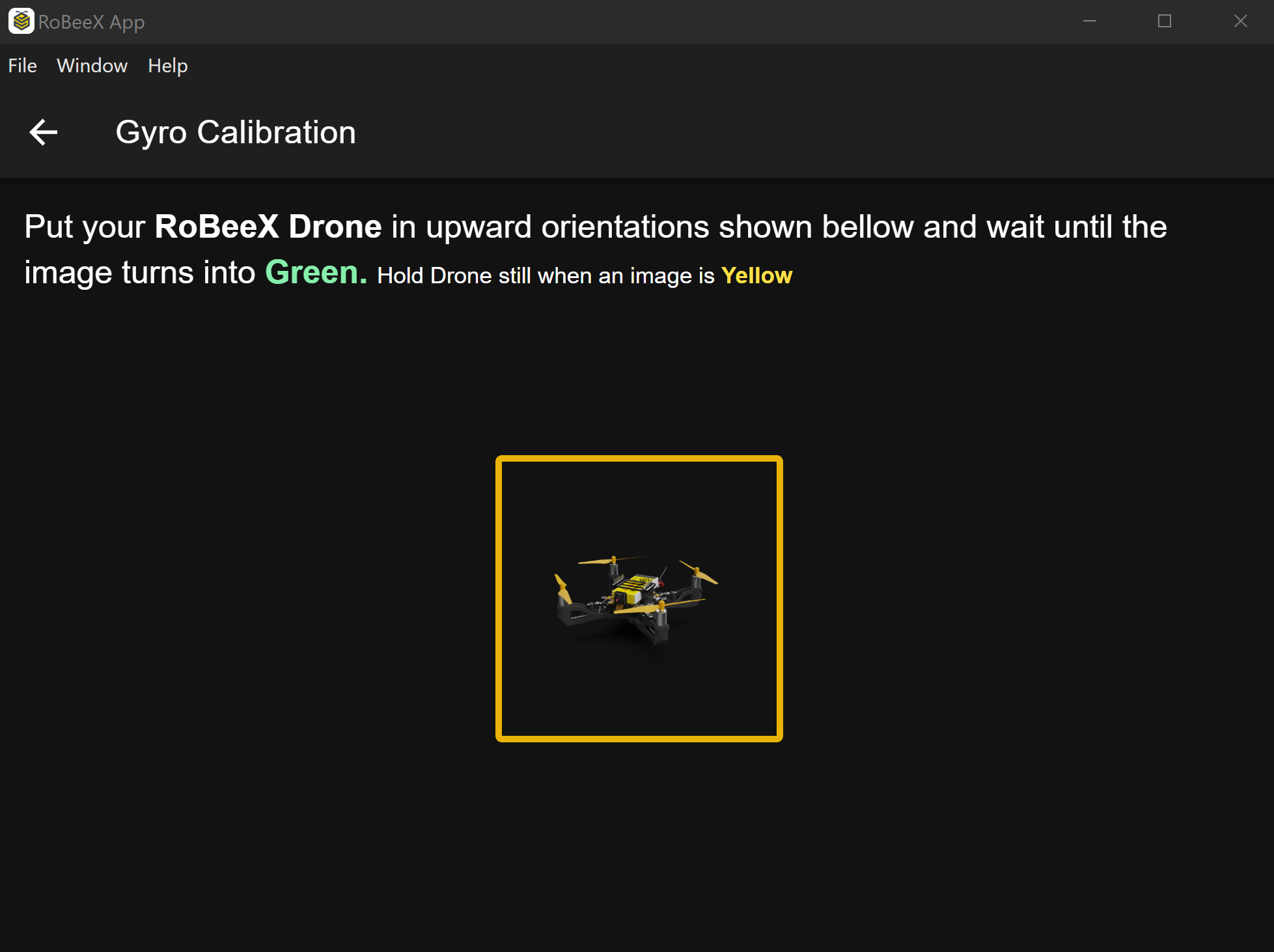
* منتظر بمانید تا برنامه تکمیل موفقیت آمیز را با **"Status: OK !"** تایید کند.
- تکمیل:
- پس از دریافت تأیید موفقیت آمیز، پهپاد را مجدداً راه اندازی کنید (خاموش و دوباره روشن کنید) تا تنظیمات جدید قبل از پرواز اعمال شوند.
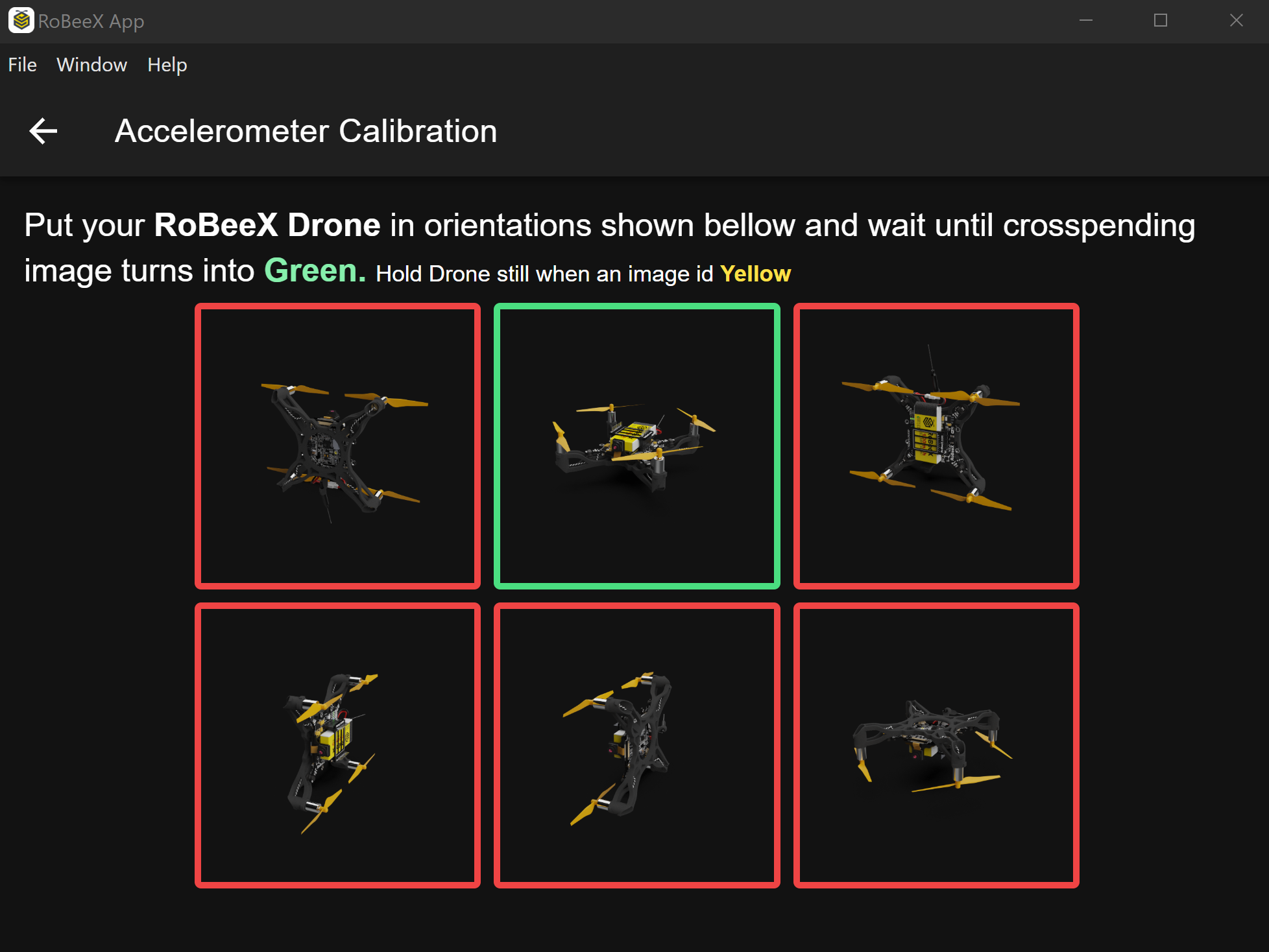
3. 📐 کالیبراسیون شتاب سنج
🎥 راهنمای ویدئویی: نحوه کالیبره کردن شتابسنج
شتاب سنج شیب پهپاد را تشخیص می دهد. این روش نیاز به قرارگیری فیزیکی خاصی از پهپاد دارد.
روش کار
- آغاز:
- برنامه RoBeeX را باز کنید و به Settings → تب Calibration بروید.
- در بخش Accelerometer، گزینه "Calibrate" را انتخاب کنید.
- اجرا (دنبال کردن راهنمای روی صفحه):
- با دقت دستورالعمل های روی صفحه را دنبال کنید تا پهپاد را در هر زاویه مورد نیاز قرار دهید.
- حیاتی: پهپاد را زمانی که تصویر زرد است، ثابت نگه دارید. برنامه هنگام موفقیت آمیز بودن جهت گیری با سبز شدن کادر، تأیید می کند.
- تکمیل:
- برنامه هنگام موفقیت آمیز بودن کل کالیبراسیون تأیید می کند.
- پس از دریافت تأیید موفقیت آمیز، پهپاد را مجدداً راه اندازی کنید تا تنظیمات جدید اعمال شوند.
⚠️ نکته رفع مشکل
| مشکل | علت احتمالی | راه حل |
|---|---|---|
| چشمک زدن LED های قرمز/زرد | سنسور IMU به کالیبراسیون فوری نیاز دارد. | روش های ژیروسکوپ و شتاب سنج بالا را دنبال کنید. |
| کالیبراسیون ناموفق | پهپاد در حین فرآیند تکان خورده یا حرکت کرده است. | روش کار را تکرار کنید، اطمینان حاصل کنید که پهپاد کاملاً ثابت است. |
| کالیبراسیون ناموفق | تداخل مغناطیسی قوی در نزدیکی وجود دارد. | کل مجموعه را به مکانی دور از اشیاء فلزی بزرگ یا وسایل الکترونیکی منتقل کنید. |
| پرواز ناپایدار | کالیبراسیون IMU یا قدیمی شده یا ناقص است. | IMU را دوباره کالیبره کنید؛ کالیبراسیون سنسور باید در حالی که پهپاد ثابت است و در حال پرواز نیست، انجام شود. |