⚙️ منوی تنظیمات مرجع
منوی تنظیمات که از طریق آیکن چرخدنده در داشبورد اصلی قابل دسترسی است، جایی است که رفتار پهپاد، مدیریت پارامترهای ایمنی، کالیبره کردن حسگرها و مشاهده اطلاعات سیستم را پیکربندی میکنید. این منو به چهار تب اصلی تقسیم میشود.
🚁 تب تنظیمات پهپاد
این تب پیکربندی سختافزاری و محدودیتهای پرواز را کنترل میکند.
📸 دوربین
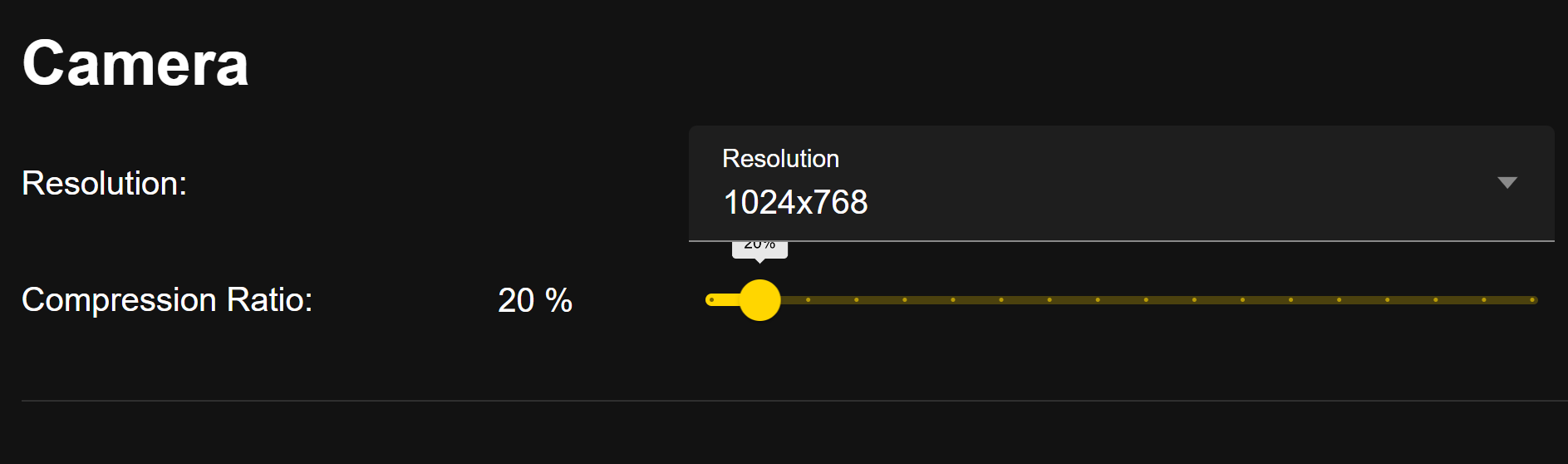
تنظیمات دوربین به شما اجازه میدهند کیفیت ویدیو و عکس، از جمله رزولوشن و نسبت فشردهسازی را برای تمام رسانههای ضبطشده توسط پهپاد سفارشی کنید.
TIP
انتخاب رزولوشن پایینتر و افزایش نسبت فشردهسازی منجر به پخش زنده سریعتر ویدیو (FPS بالاتر و تأخیر/latency کمتر) میشود، و عملکرد انتقال را بر کیفیت فایل رسانه اولویت میدهد.
| تنظیم | توضیحات | محدوده |
|---|---|---|
| رزولوشن | کیفیت تصویر و ویدیو را بر حسب پیکسل تعریف میکند. رزولوشن پایینتر از پهنای باند و فضای ذخیرهسازی کمتری استفاده میکند و به طور قابل توجهی نرخ پخش زنده (FPS) را بهبود میبخشد و تأخیر را کاهش میدهد. | 320x240, 480x320, 640x480, 800x600, 1024x768 |
| نسبت فشردهسازی | اندازه فایل و کیفیت رسانههای ضبطشده را کنترل میکند. نسبت پایینتر (مثلاً 15%) به معنای کیفیت تصویر بالاتر است اما منجر به فایلهای بزرگتر میشود و ممکن است عملکرد پخش زنده را کاهش دهد. | اسلایدر (0% - بالاترین کیفیت به 100% - پایینترین کیفیت) |
TIP
🤖 تنظیمات پیشنهادی برای پردازش تصویر
برای پردازش تصویر قابل اعتماد و وظایف بینایی کامپیوتر، بهترین تعادل با موارد زیر به دست میآید:
- رزولوشن:
640x480 - نسبت فشردهسازی:
30%
این پیکربندی جزئیات کافی برای عملکرد مؤثر الگوریتمها را تضمین میکند در حالی که تأخیر کم (تأخیر) مورد نیاز برای کنترل بیدرنگ را حفظ میکند.
⚠️ ایمنی
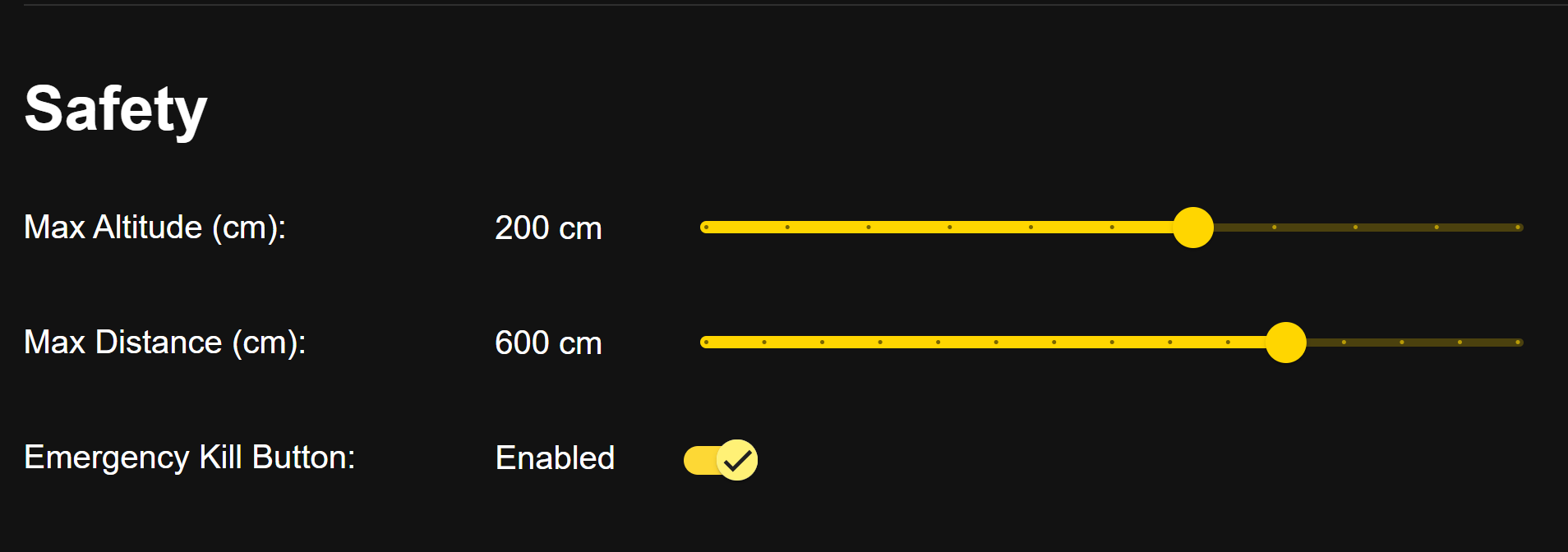
تنظیمات ایمنی به شما اجازه میدهند محدودیتهای مهمی را بر دامنه پرواز پهپاد تعریف کنید تا از عملکرد ایمن در تمام محیطها اطمینان حاصل شود.
| تنظیم | توضیحات | نوع کنترل |
|---|---|---|
| حداکثر ارتفاع (سانتی متر) | حداکثر ارتفاعی را که پهپاد اجازه پرواز دارد تعیین میکند. حداکثر محدودیت 300cm(3 متر) بالای سطحی است که پهپاد در هر لحظه از پرواز در بالای آن قرار دارد. | اسلایدر |
| حداکثر فاصله (سانتی متر) | حداکثر برد افقی را که پهپاد میتواند از نقطه مبدأ (نقطه بلند شدن/فعالسازی) پرواز کند تعیین میکند. حداکثر محدودیت 800cm(8 متر) است. | اسلایدر |
| دکمه توقف اضطراری | بسیار مهم: در صورت فعالسازی، امکان خاموش شدن فوری موتور از طریق یک دکمه/دستور چوب مشخص را فراهم میکند. توصیه میشود اکیداً این گزینه را فعال نگه دارید. | کلید تغییر وضعیت (Toggle Switch) |
DANGER

- دکمه توقف اضطراری: دکمه قرمز بزرگ با عنوان "
KILL" یک ویژگی توقف اضطراری بسیار مهم است که به طور فوری برق تمام موتورها را در هر شرایطی قطع میکند. تنها در مواقع اضطراری برای جلوگیری از آسیب به افراد یا خسارت فاجعهبار به اموال از دکمه KILL استفاده کنید.
💡 LED چراغ قوه پایین
این تنظیم به شما اجازه میدهد تا شدت (روشنایی) LED چراغ قوه پایین را کنترل کنید. این چراغ عمدتاً برای کمک به فرود در نور کم و بهبود دید زمین استفاده میشود.

| تنظیم | توضیحات | نوع کنترل |
|---|---|---|
| روشنایی پیشفرض | شدت (روشنایی) چراغ LED پایینرو پهپاد را کنترل میکند. | اسلایدر (15% حداقل تا 100% حداکثر) |
هشدار مصرف باتری
تنظیم روشنایی پیشفرض روی حداکثر (100%) منجر به افزایش قابل توجه مصرف باتری توسط پهپاد میشود که در نتیجه زمان پرواز کلی شما را کاهش میدهد. فقط در صورت لزوم از روشنایی بالا استفاده کنید.
کنترل پیشرفته
LED چراغ قوه پایین همچنین میتواند با استفاده از زبانهای برنامهنویسی مانند Blockly، Python و Arduino کنترل و برنامهریزی شود.
🛠️ تب کالیبراسیون
این تب به حفظ دقت حسگرهای پرواز حیاتی پهپاد اختصاص دارد. تمام کالیبراسیونها باید روی یک سطح صاف و پایدار انجام شوند.
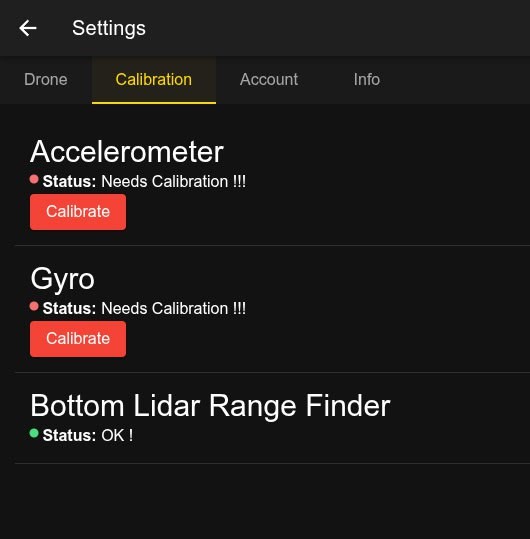
تصویر 1: قبل از کالیبراسیون - حسگرها نشان میدهند 'به کالیبراسیون نیاز دارد !!!'
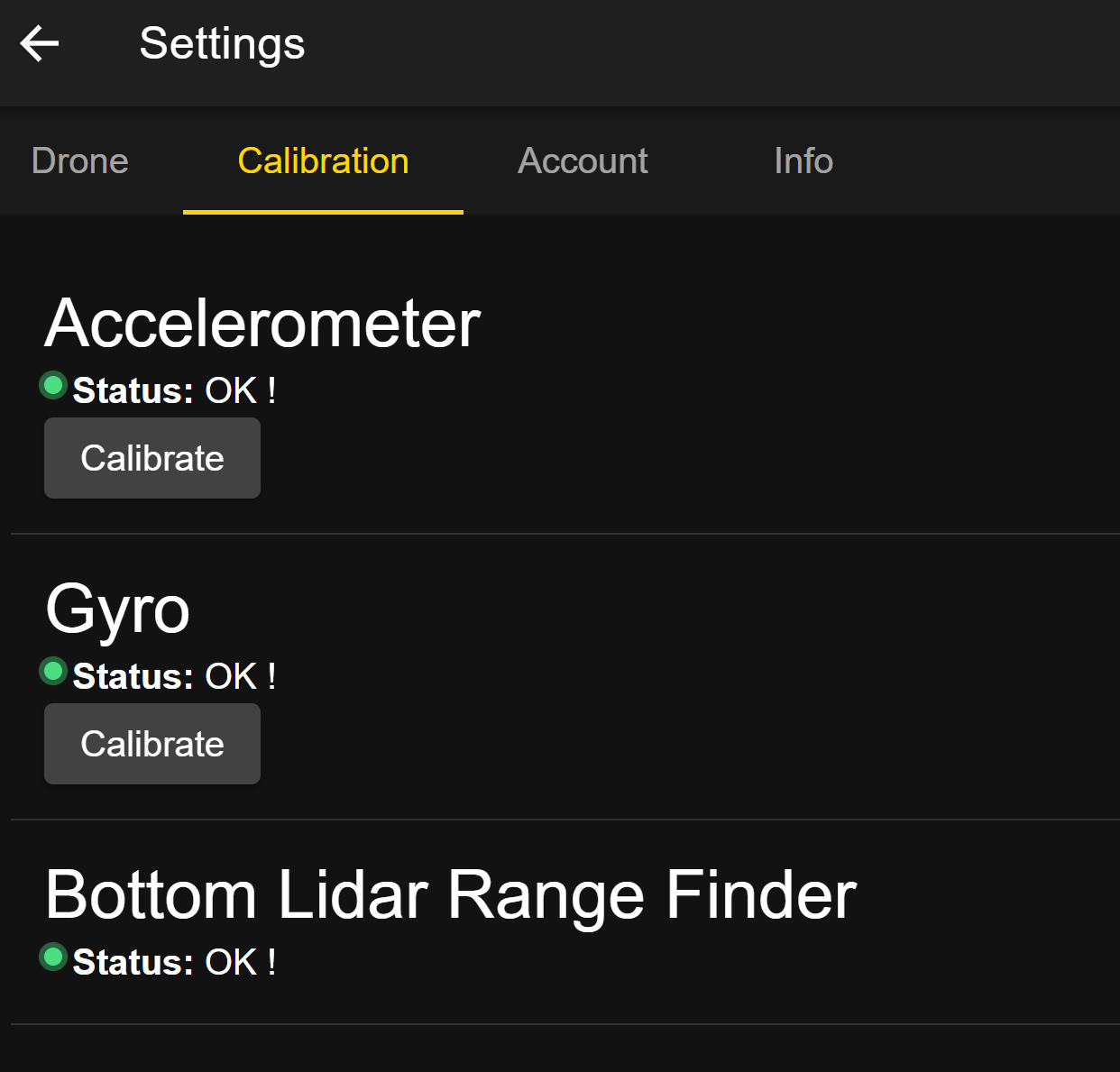
تصویر 2: بعد از کالیبراسیون - همه حسگرها نشان میدهند 'خوب است !'
| حسگر | شاخص وضعیت | اقدام | هدف |
|---|---|---|---|
| شتابسنج | 🔴 وضعیت: نیاز به کالیبراسیون !!! (قبل) / 🟢 وضعیت: خوب است ! (بعد) | دکمه کالیبره کردن | کالیبره کردن حسگری که شتاب خطی و شیب پهپاد را اندازهگیری میکند و از تشخیص دقیق حرکت اطمینان حاصل میکند. |
| ژیروسکوپ | 🔴 وضعیت: نیاز به کالیبراسیون !!! (قبل) / 🟢 وضعیت: خوب است ! (بعد) | دکمه کالیبره کردن | کالیبره کردن حسگری که سرعت زاویهای (چرخش) پهپاد را اندازهگیری میکند، که برای پرواز پایدار بسیار مهم است. |
| سنسور مسافتیاب Lidar پایین | 🟢 وضعیت: خوب است ! (معمولاً) | (بدون دکمه) | بررسی وضعیت حسگری که برای نگهداشت دقیق ارتفاع و فرود ایمن استفاده میشود. این حسگر معمولاً به کالیبراسیون کاربر نیاز ندارد. |
TIP
برای دستورالعملهای گام به گام دقیق در مورد انجام این کالیبراسیونها، از جمله IMU (شتابسنج و ژیروسکوپ)، لطفاً به صفحه کالیبراسیون IMU مراجعه کنید.
🔴🟡 هشدار بحرانی: خطای حسگر
اگر LEDهای RGB پهپاد شروع به چشمک زدن متناوب قرمز و زرد (🔴🟡) کنند، این نشاندهنده خطای بحرانی حسگر IMU است و تأیید میکند که شتابسنج و ژیروسکوپ به کالیبراسیون فوری نیاز دارند.
- اقدام مورد نیاز: باید فوراً به صفحه کالیبراسیون IMU مراجعه کنید تا این مشکل را برطرف کنید.
👤 تب حساب کاربری
این بخش به کاربر امکان میدهد تا مشخصات حساب RoBeeX خود را مشاهده و مدیریت کند. برای راهنمایی دقیق در مورد ایجاد، دسترسی و مدیریت مشخصات خود، لطفاً به صفحه مدیریت حساب کاربری مراجعه کنید.
ℹ️ تب اطلاعات
این تب اطلاعات نسخه و ساخت حیاتی برنامه را ارائه میدهد که برای گزارش باگها یا عیبیابی مشکلات فنی ضروری است.
| فیلد اطلاعات | مقدار مثال | توضیحات |
|---|---|---|
| لوگو برنامه | (تصویر از لوگوی RoBeeX) | شناسه بصری و نام تجاری برنامه. |
| اطلاعات نسخه | 0.45.0 | شماره نسخه نرمافزار اصلی و قابل مشاهده کاربر از برنامه RoBeeX نصبشده. |
| هشکامیت / شماره ساخت | 74aab33 | یک کد مرجع داخلی برای ساخت نرمافزار دقیق، که عمدتاً توسط توسعهدهندگان برای پشتیبانی استفاده میشود. |
| زمان ساخت | 2025/10/26, 00:37:41 | تاریخ و زمان دقیق زمانی که نسخه فعلی برنامه کامپایل شده است. |