🕹️ کنترل دستی پرواز
پس از فعالسازی و کالیبره شدن کامل پهپاد، میتوانید عملیات پرواز دستی را با استفاده از رابط کاربری برنامه RoBeeX آغاز کنید.
الزامات حساب کاربری
اگر هنوز وارد حساب کاربری RoBeeX خود نشدهاید، باید قبل از ادامه کار وارد شوید. لطفاً به صفحه مدیریت حساب کاربری برای مراحل دقیق نحوه ایجاد، دسترسی و مدیریت حساب کاربری خود مراجعه کنید.
🔌 اتصال به پهپاد هوشمند RoBeeX
این روش اتصال Wi-Fi مستقیم بین دستگاه شما و پهپاد را برای کنترل دستی، برنامهنویسی و پخش زنده ویدیو برقرار میکند.
دستورالعملهای اتصال
- روشن کردن:
- روشن کردن: پهپاد هوشمند RoBeeX خود را روشن کنید. (برای دستورالعملهای دقیق در مورد شارژ باتری، نصب و روشن کردن پهپاد، لطفاً به شارژ و باتری مراجعه کنید)
- اتصال Wi-Fi:
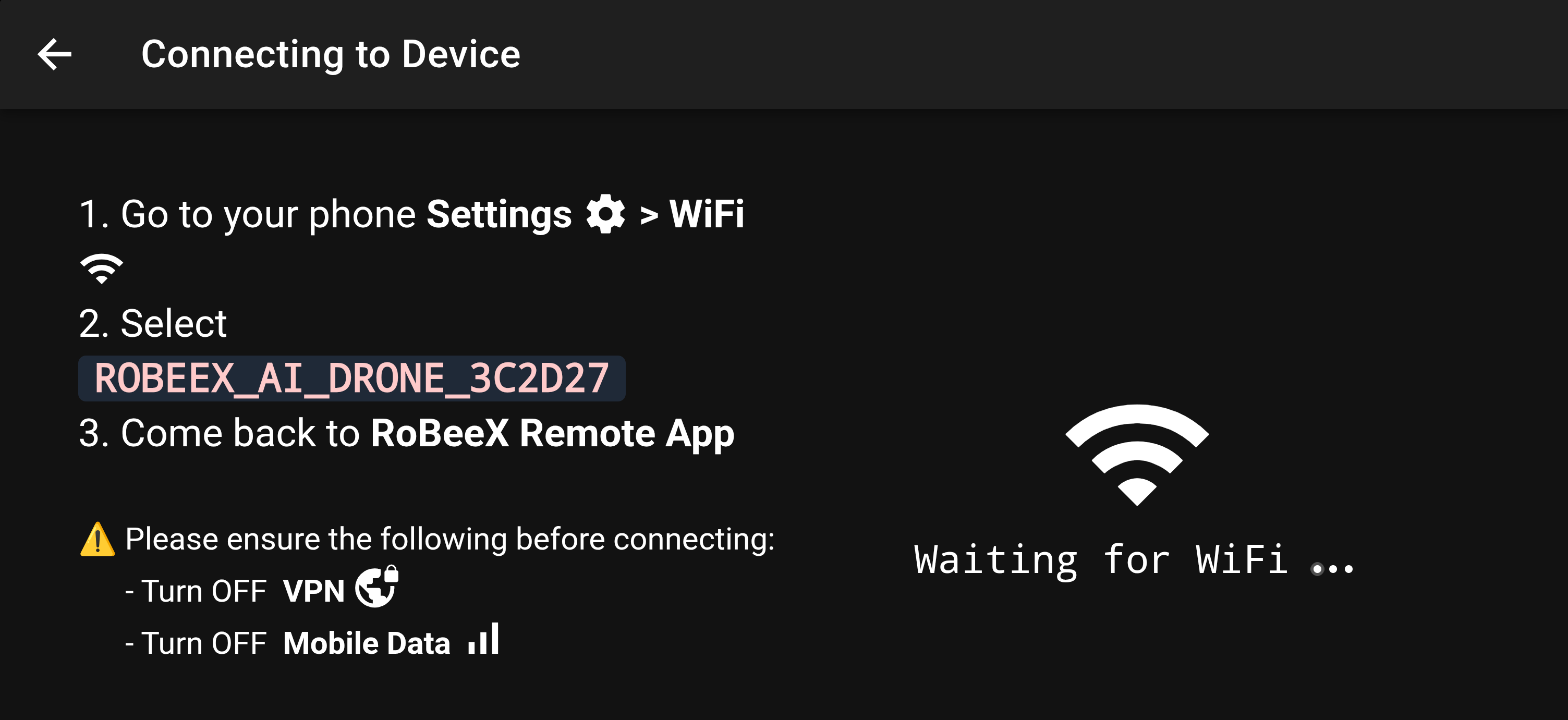
- مرحله 1: به تنظیمات (⚙️) → Wi-Fi دستگاه خود بروید.
- مرحله 2: شبکه Wi-Fi پهپاد را انتخاب کنید (مثلاً ROBEEX_AI_DRONE_XXXXXX).
رمز عبور Wi-Fi: رمز عبور پیشفرض برای هر پهپاد هوشمند RoBeeX،
1234567890است. - مرحله 3: به برنامه RoBeeX Remote App بازگردید.
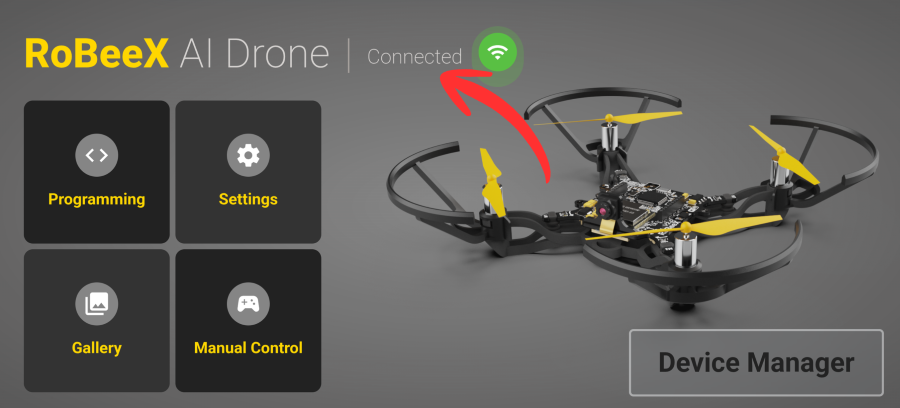
- وضعیت برنامه:
- صفحه اصلی برنامه باید بهروزرسانی شود تا "Connected" (متصل) نشان داده شود و نماد Wi-Fi سبز شود.
🚨 اطلاعیه پیشنیاز اتصال
مهم: لطفاً قبل از تلاش برای اتصال به شبکه Wi-Fi پهپاد RoBeeX، تنظیمات زیر را در دستگاه تلفن همراه یا لپتاپ خود خاموش کنید:
- VPN (شبکه خصوصی مجازی) را خاموش کنید.
- داده تلفن همراه را خاموش کنید.
برای شروع پرواز، دکمه "Manual Control" (کنترل دستی) را که در داشبورد اصلی برنامه قرار دارد، فشار دهید. این کار صفحه پرواز را باز می کند که شامل جوی استیک های مجازی و ورودی های کنترل است.
⚠️ الزامات و بررسیهای ایمنی قبل از پرواز
INFO
قبل از پرواز با پهپاد، توقف کنید و مطمئن شوید که مراحل راهاندازی ضروری و بررسیهای ایمنی زیر را تکمیل کردهاید:
- 💾 نصب برنامه و حساب کاربری: اطمینان حاصل کنید که برنامه نصب شده و وارد حساب کاربری خود شدهاید.
- ⚡ فعالسازی پهپاد: تأیید کنید که پهپاد بهروزرسانی OTA اجباری خود را تکمیل کرده است.
- 🎯 کالیبراسیون IMU: اطمینان حاصل کنید که پس از فعالسازی، کالیبراسیون IMU (شتابسنج و ژیروسکوپ) را تکمیل کردهاید.
- 🔋 بررسی باتری: باتری باید کاملاً شارژ شده باشد (100٪). با شارژ کمتر از 30٪ پرواز نکنید.
- ⚙️ بررسی ملخ: تمام ملخها را از نظر آسیبدیدگی (ترک، خمیدگی، فرورفتگی) بررسی کنید و مطمئن شوید که به طور محکم به شفت موتور متصل شدهاند.
- 🛡️ محافظ ملخ: برای ایمنی، بهویژه هنگام پرواز در داخل ساختمان یا نزدیک موانع، محافظ ملخها را نصب کنید.
🔴🟡 هشدار حیاتی: خطای سنسور
اگر LEDهای RGB پهپاد شروع به چشمک زدن متناوب قرمز و زرد (🔴🟡) کنند، این نشان دهنده خطای سنسور حیاتی است و تأیید میکند که IMU (واحد اندازهگیری اینرسی) نیاز به کالیبراسیون فوری دارد.
- اقدام لازم: باید فوراً به کالیبراسیون IMU مراجعه کنید.
🛑 هشدارهای حیاتی ایمنی پرواز
DANGER
- هرگز بر فراز مردم پرواز نکنید: پهپاد را بر فراز سر انسانها، کودکان یا حیوانات خانگی پرواز ندهید. فاصله ایمن افقی را حفظ کنید.
- خطر ملخ: هرگز انگشتان خود یا هیچ جسم خارجی را وارد ملخها در حالی که میچرخند یا در طول پرواز نکنید.
- موتورهای داغ: موتورها پس از هر پرواز
بسیار داغمیشوند. برای جلوگیری از سوختگی، بلافاصله پس از فرودبه موتورها دست نزنید.
DANGER

- دکمه توقف اضطراری: دکمه "
KILL" قرمز بزرگ یک ویژگی توقف اضطراری بسیار مهم است که بلافاصله برق تمام موتورها را در هر شرایطی قطع می کند. فقط در مواقع اضطراری برای جلوگیری از آسیب رساندن به افراد یا خسارت فاجعه بار به اموال از دکمه KILL استفاده کنید.
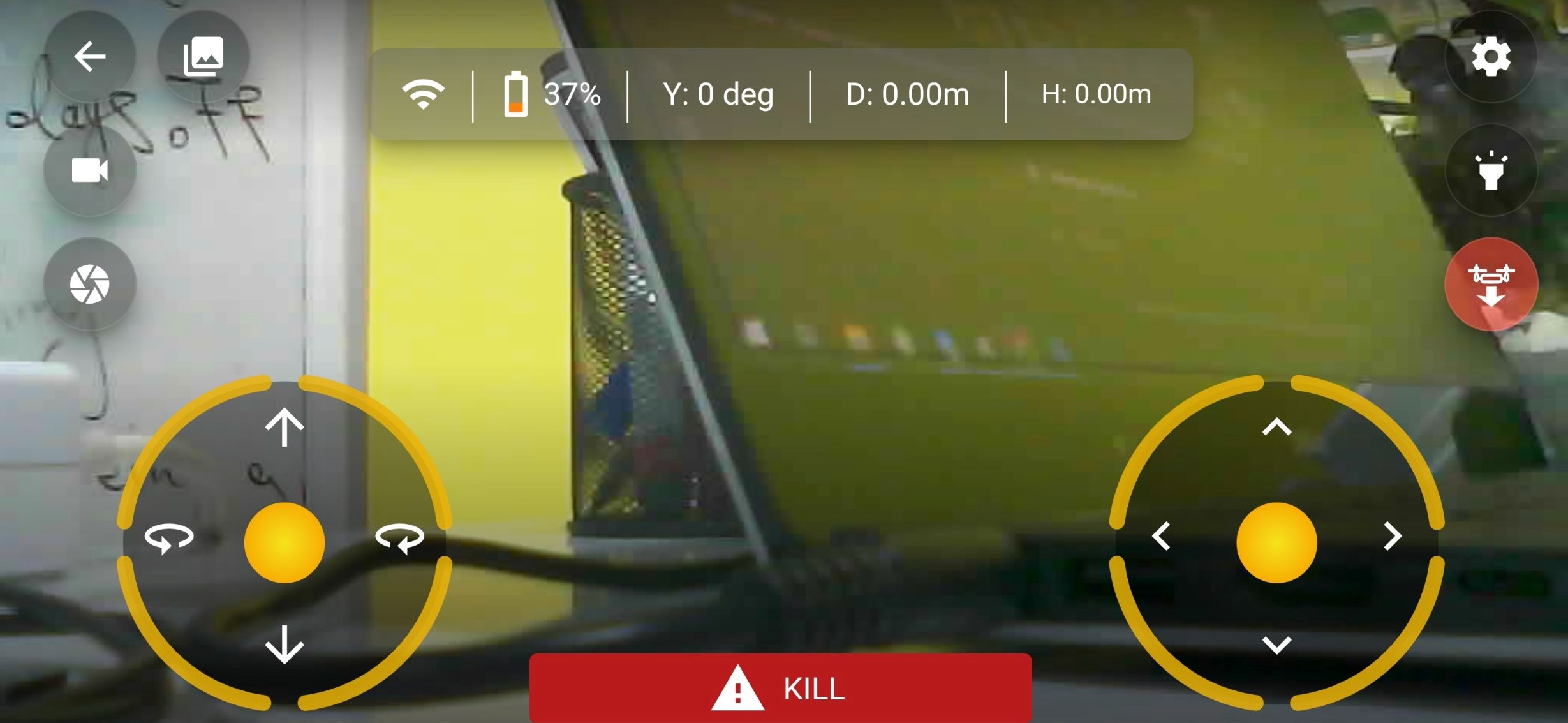
🚀 رابط کاربری پرواز
رابط کاربری پرواز، پخش زنده ویدیو، جوی استیکهای مجازی و دادههای مهم تلهمتری را ارائه میدهد.
📊 نوار وضعیت و تلهمتری

| نشانگر | محدوده | توضیحات |
|---|---|---|
| آیکون Wi-Fi | نوار قدرت | قدرت اتصال Wi-Fi بین پهپاد و برنامه را نشان میدهد. |
| آیکون باتری | 0٪ تا 100٪ | سطح باقیمانده شارژ باتری را نشان میدهد. |
| Y (Yaw) | درجه | چرخش جهت پهپاد بر حسب درجه نسبت به جهت برخاستن. |
| D (Distance) | متر (m) | فاصله افقی از نقطه خانه (محل برخاستن). |
| H (Height) | متر (m) | ارتفاع پهپاد نسبت به سطحی که مستقیماً زیر آن قرار دارد (توسط رنجیاب لیدار اندازهگیری میشود). |
WARNING
🔋 هشدار باتری کم و ویبره:
- ⚠️ 30٪ شارژ (هشدار): هنگامی که سطح باتری به 30٪ برسد، دستگاه تلفن همراه یا تبلت متصل، ویبره (لرزش) آهسته را برای هشدار دادن به اپراتور ارائه میدهد.
- 🚨 <15٪ شارژ (حیاتی): وقتی سطح باتری کمتر از 15٪ باشد، ویبره شدید میشود و حالت باتری کم حیاتی را نشان میدهد و نیاز به
فرود فوریدارد.
🚨خطر
⚠️🔥 هرگز از باتریهای پرواز متورم شده، نشتی یا آسیبدیده استفاده یا شارژ نکنید. باتریهای در این حالت خطرناک، خطر آتشسوزی جدی دارند.
🧭 کنترلهای جوی استیک مجازی
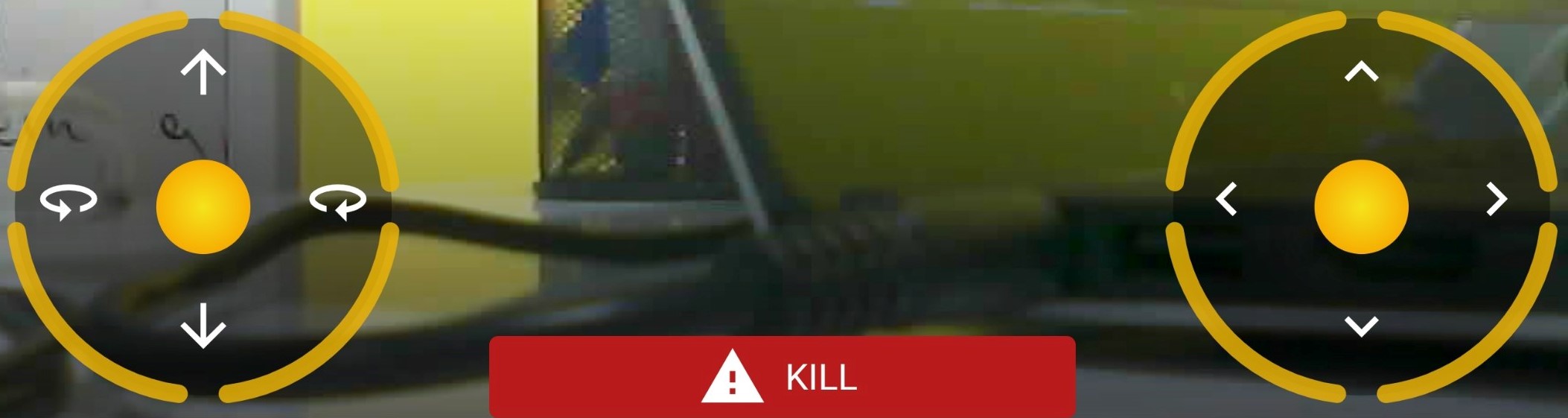
پهپاد هوشمند RoBeeX با استفاده از دو جوی استیک مجازی در صفحه برنامه تلفن همراه کنترل میشود. این جوی استیکها حرکت پهپاد را در چهار محور کنترل میکنند: Throttle (گاز)، Yaw (چرخش)، Pitch (شیب) و Roll (غلتش).
1. ⬆️ Throttle (جوی استیک چپ، محور عمودی)
Throttle حرکت عمودی پهپاد را کنترل میکند. این کار توان کل تامین شده به هر چهار موتور را به طور همزمان تنظیم میکند.
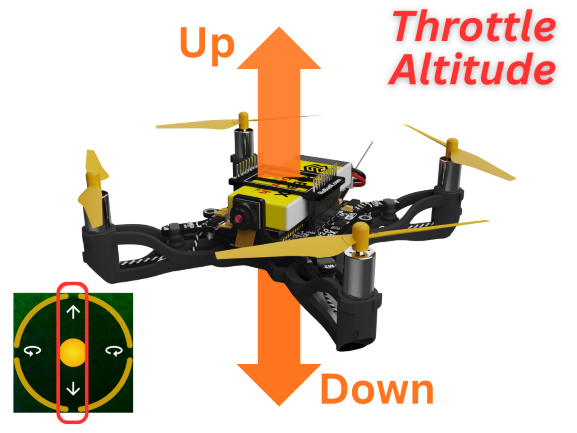
- عملکرد: ارتفاع (صعود / فرود)
- عملکرد:
- به بالا فشار دهید: افزایش توان کل موتور باعث میشود پهپاد صعود کند.
- به پایین بکشید: کاهش توان کل موتور باعث میشود پهپاد فرود کند.
2. 🔄 Yaw (جوی استیک چپ، محور افقی)
Yaw چرخش پهپاد را حول محور عمودی مرکزی خود کنترل میکند. این کار جهت رو به جلوی پهپاد را بدون تغییر موقعیت افقی آن تغییر میدهد.

- عملکرد: چرخش (جهت)
- عملکرد:
- به چپ فشار دهید: پهپاد را در خلاف جهت عقربههای ساعت (چپ) میچرخاند.
- به راست فشار دهید: پهپاد را در جهت عقربههای ساعت (راست) میچرخاند.
3. ↔️ Roll (جوی استیک راست، محور افقی)
Roll حرکت پهپاد را در جهت پهلو به پهلو (جانبی) کنترل میکند. پهپاد کمی بدنه خود را به چپ یا راست کج میکند تا یک نیروی رانش جانبی ایجاد کند.
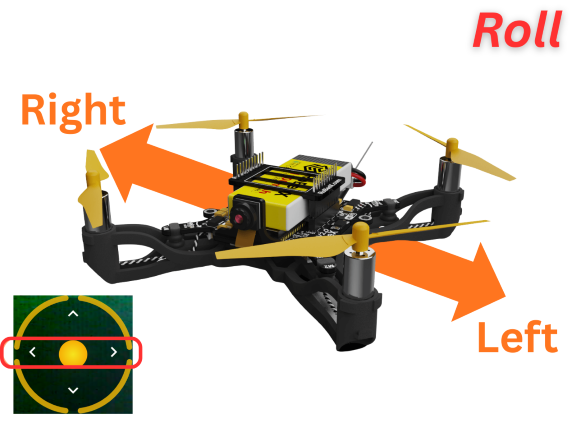
- عملکرد: حرکت جانبی (حرکت پهلو به پهلو)
- عملکرد:
- به چپ فشار دهید: پهپاد به سمت چپ کج میشود و باعث میشود به سمت چپ (حرکت پهلو به پهلو) حرکت کند.
- به راست فشار دهید: پهپاد به سمت راست کج میشود و باعث میشود به سمت راست (حرکت پهلو به پهلو) حرکت کند.
4. ↕️ Pitch (جوی استیک راست، محور عمودی)
Pitch حرکت پهپاد را به جلو و عقب کنترل میکند. پهپاد بینی خود را به سمت بالا یا پایین کج میکند تا نیروی رانش به جلو یا عقب ایجاد کند.

- عملکرد: حرکت انتقالی (جلو / عقب)
- عملکرد:
- به بالا فشار دهید: بینی پهپاد را به پایین کج میکند و باعث میشود پهپاد جلو حرکت کند.
- به پایین بکشید: بینی پهپاد را به بالا کج میکند و باعث میشود پهپاد عقب حرکت کند.
📸 دکمههای دوربین و گالری
| دکمه | آیکون | عملکرد | یادداشتها |
|---|---|---|---|
| دکمه بازگشت |  | به صفحه قبلی یا داشبورد اصلی باز میگردد. | - |
| دسترسی به گالری |  | گالری رسانه درونبرنامهای را برای مشاهده فایلهای ذخیره شده باز میکند. | عددی که در دایره قرمز زیر دکمه گالری قرار دارد با هر عکس گرفته شده افزایش مییابد. به منوی گالری مراجعه کنید |
| ضبط ویدیو |  | ضبط ویدیو را روشن/خاموش میکند. | در طول ضبط، دکمه Stop (توقف) و یک شمارنده زمان ضبط زیر نمای دوربین ظاهر میشوند. |
| گرفتن عکس |  | یک عکس ثابت میگیرد. | عددی که در دایره قرمز زیر دکمه گالری قرار دارد با هر عکس گرفته شده افزایش مییابد. |
TIP

وضعیت ضبط ویدیو: هنگامی که ضبط فعال است، زمان ضبط و دکمه Stop (توقف) در پایین رابط کاربری پرواز ظاهر میشوند. زمان، شمارنده در حال اجرا را بر حسب دقیقه و ثانیه نمایش میدهد (مثلاً 00:03). فشردن دکمه Stop (توقف) بلافاصله ضبط ویدیو را متوقف میکند و فایل را ذخیره میکند. برای مشاهده تمام عکسها و ویدیوهای گرفته شده، به منوی گالری مراجعه کنید.
⚙️دکمه منوی تنظیمات
| دکمه | آیکون | عملکرد | یادداشتها |
|---|---|---|---|
| منوی تنظیمات |  | این مرکز پیکربندی مرکزی برای مدیریت رفتار پهپاد، پارامترهای ایمنی، کالیبراسیون سنسور، جزئیات حساب کاربری و مشاهده اطلاعات سیستم استفاده میشود. | برای دسترسی به منوی تنظیمات و درک گزینههای پیکربندی آن، لطفاً به منوی تنظیمات مراجعه کنید. |
💡دکمه LED فلش پایین
| دکمه | آیکون | عملکرد | یادداشتها |
|---|---|---|---|
| LED فلش پایین |  | LED چراغ قوه پایین را روشن یا خاموش میکند. این چراغ به فرود در نور کم و دیدن زمین کمک میکند. | سطح روشنایی در منوی تنظیمات از طریق منوی تنظیمات قابل تنظیم است. |
TIP
کنترل پیشرفته: چراغ قوه پایین همچنین میتواند با استفاده از زبانهای برنامهنویسی مانند Blockly، پایتون و آردوینو کنترل و برنامهریزی شود.
🚦 دکمههای برخاستن و فرود
برنامه RoBeeX از دکمههای اختصاصی روی صفحه نمایش برای راهاندازی ایمن برخاستن و فرود خودکار استفاده میکند. هر دو عملکرد نیاز به تأیید فشار دادن و نگه داشتن دارند تا از فعالسازی تصادفی جلوگیری شود.
⬆️ برخاستن خودکار
- آمادهسازی: پهپاد را روی یک سطح تخت، صاف و باز قرار دهید.
- شروع: دکمه "Auto Takeoff" (
 ) را در سمت راست صفحه پرواز فشار دهید.
) را در سمت راست صفحه پرواز فشار دهید. - پنجره تأیید: یک پنجره بازشو ظاهر میشود که دکمه "Take Off" بزرگی را نشان میدهد. (به تصویر زیر مراجعه کنید).
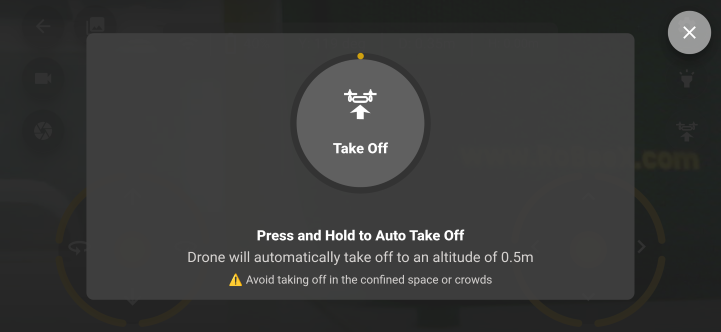
- اجرا: دکمه مرکزی "Take Off" را فشار داده و نگه دارید تا زمانی که نشانگر دایرهای زرد تکمیل شود (دایره زرد اطراف دکمه پر میشود).
- پهپاد به طور خودکار موتورهای خود را راهاندازی میکند و به ارتفاع ایمن 0.5 متر (50 سانتیمتر) صعود میکند، جایی که شناور میماند.
WARNING
فضای برخاستن: برای اطمینان از دسترسی پهپاد به هوا، از برخاستن در فضاهای بسته یا مستقیماً بالای جمعیت خودداری کنید.
⬇️ فرود خودکار
- موقعیتیابی: پهپاد را به محل فرود دلخواه ببرید و مطمئن شوید که سطح صاف و از موانع خالی است.
- شروع: دکمه "Auto Land" (
 ) را در سمت راست صفحه پرواز فشار دهید.
) را در سمت راست صفحه پرواز فشار دهید. - پنجره تأیید: یک پنجره بازشو ظاهر میشود که دکمه "Land" بزرگی را نشان میدهد. (به تصویر زیر مراجعه کنید).
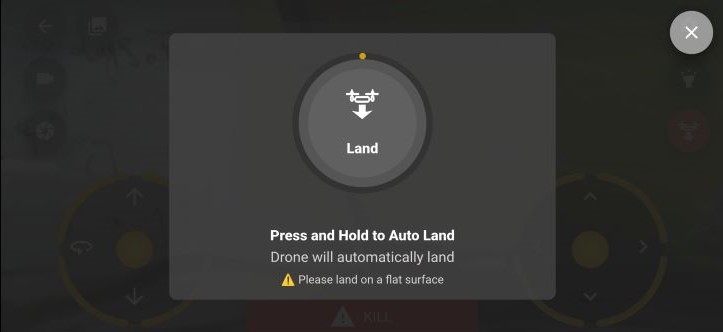
- اجرا: دکمه مرکزی "Land" را فشار داده و نگه دارید تا رویه آغاز شود.
- پهپاد به طور خودکار فرود میآید، سرعت موتور را کاهش میدهد و بلافاصله پس از تماس با زمین موتورها را خاموش میکند.